About
Specimens is a 7-month diploma project developed at
ENSCI - Les Ateliers, under the mentorship of
Matt Sindall, and publicly defended in Paris in January 2026.
In response to the rapid acceleration of AI and robotics,
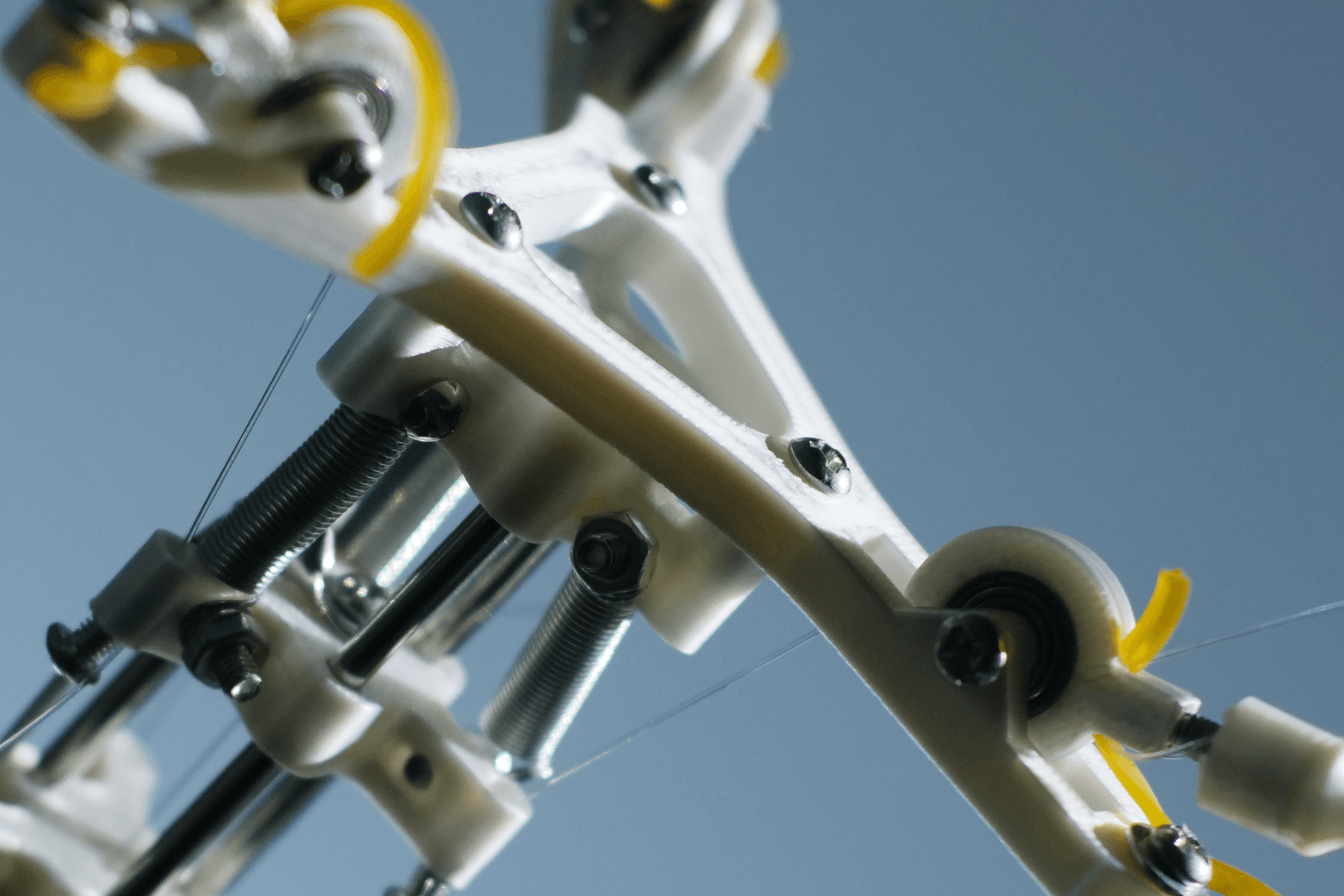
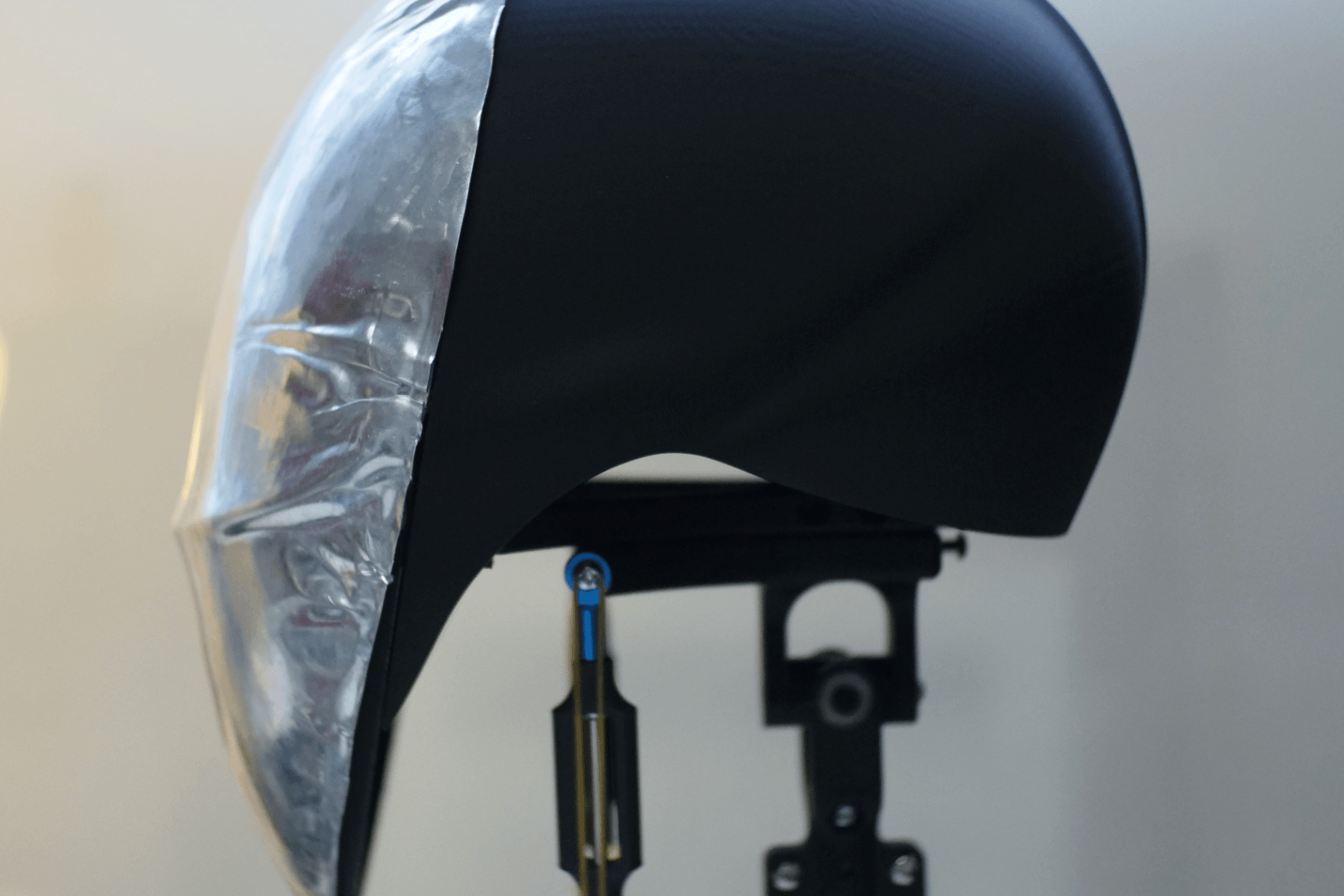
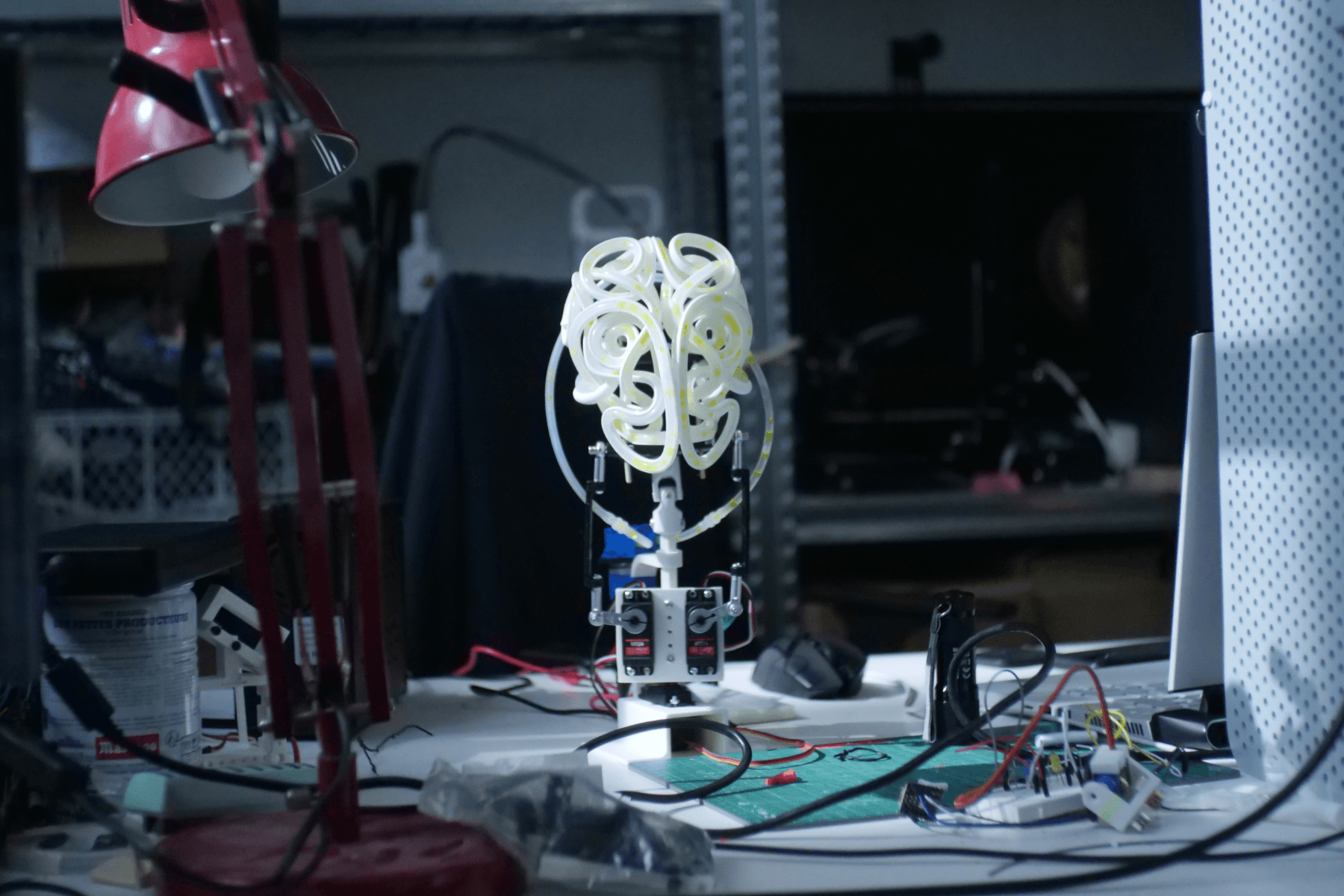
I chose to focus on the "head", a crucial yet often forgotten element in the current industry.
This research journey spanned projective psychology, network communication, and smart materials, requiring the development of custom tools and systems.
It solidified my conviction that design is essential to robotics , bridging the gap between aesthetics, usability, and critical thinking.
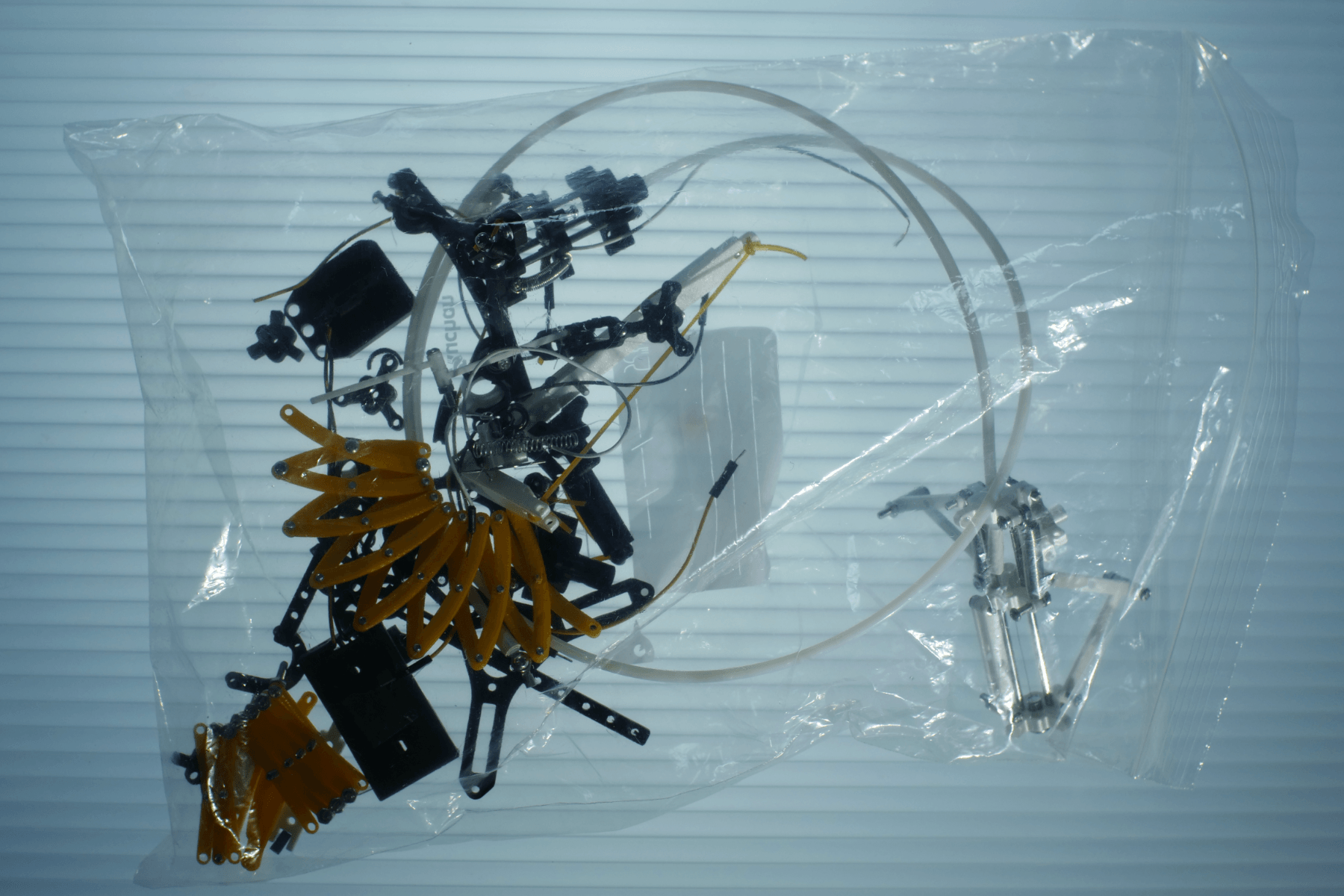
These are only the first specimens of an evolving collection. I am now seeking collaborations and opportunities to push this vision further and contribute to the ongoing debate on robotics.
Big thanks to all those who shared their advice and support throughout this journey !